Note
Go to the end to download the full example code.
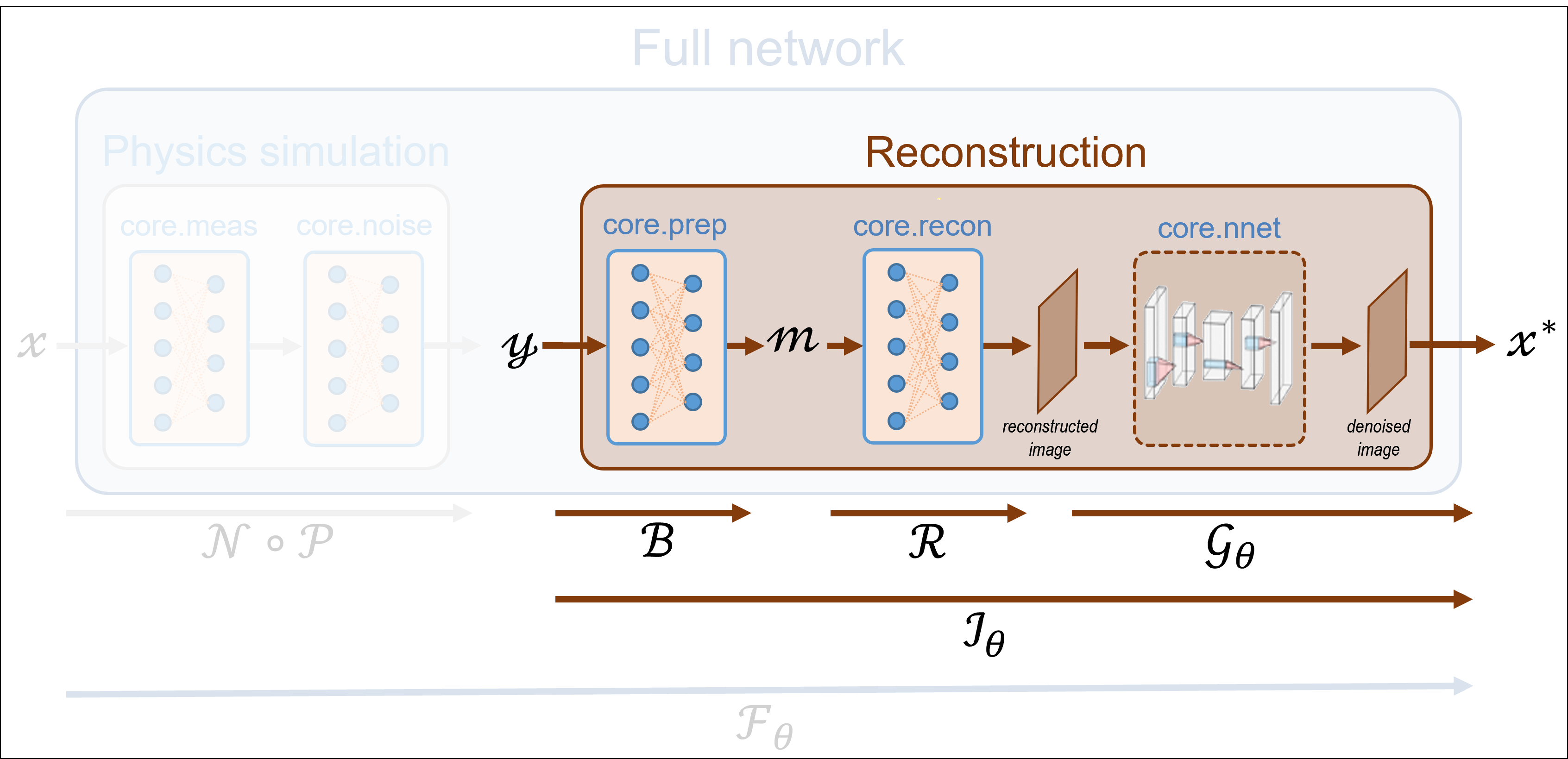
06. Denoised Completion Network (DCNet)
This tutorial shows how to perform image reconstruction using the denoised completion network (DCNet) with a trainable image denoiser. In the next tutorial, we will plug a denoiser into a DCNet, which requires no training.
Note
As in the previous tutorials, we consider a split Hadamard operator and measurements corrupted by Poisson noise (see Tutorial 5).
Load a batch of images
Update search path
# sphinx_gallery_thumbnail_path = 'fig/tuto6.png'
import os
spyritPath = os.getcwd()
imgs_path = os.path.join(spyritPath, "images/")
Images \(x\) for training neural networks expect values in [-1,1]. The images are normalized and resized using the transform_gray_norm() function.
from spyrit.misc.statistics import transform_gray_norm
h = 64 # image is resized to h x h
transform = transform_gray_norm(img_size=h)
Create a data loader from some dataset (images must be in the folder images/test/)
import torch
import torchvision
dataset = torchvision.datasets.ImageFolder(root=imgs_path, transform=transform)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=7)
x, _ = next(iter(dataloader))
print(f"Shape of input images: {x.shape}")
Shape of input images: torch.Size([7, 1, 64, 64])
Select the i-th image in the batch
i = 1 # Image index (modify to change the image)
x = x[i : i + 1, :, :, :]
x = x.detach().clone()
b, c, h, w = x.shape
Plot the selected image
![$x$ in [-1, 1]](../_images/sphx_glr_tuto_06_dcnet_split_measurements_001.png)
Forward operators for split measurements
We consider noisy measurements obtained from a split Hadamard operator, and a subsampling strategy that retaines the coefficients with the largest variance (for more details, refer to Tutorial 5).
First, we download the covariance matrix from our warehouse.
import girder_client
import numpy as np
# api Rest url of the warehouse
url = "https://pilot-warehouse.creatis.insa-lyon.fr/api/v1"
# Generate the warehouse client
gc = girder_client.GirderClient(apiUrl=url)
# Download the covariance matrix and mean image
data_folder = "./stat/"
dataId_list = [
"63935b624d15dd536f0484a5", # for reconstruction (imageNet, 64)
"63935a224d15dd536f048496", # for reconstruction (imageNet, 64)
]
cov_name = "./stat/Cov_64x64.npy"
try:
Cov = np.load(cov_name)
print(f"Cov matrix {cov_name} loaded")
except FileNotFoundError:
for dataId in dataId_list:
myfile = gc.getFile(dataId)
gc.downloadFile(dataId, data_folder + myfile["name"])
print(f"Created {data_folder}")
Cov = np.load(cov_name)
print(f"Cov matrix {cov_name} loaded")
except:
Cov = np.eye(h * h)
print(f"Cov matrix {cov_name} not found! Set to the identity")
Cov matrix ./stat/Cov_64x64.npy loaded
We define the measurement, noise and preprocessing operators and then simulate a measurement vector corrupted by Poisson noise. As in the previous tutorials, we simulate an accelerated acquisition by subsampling the measurement matrix by retaining only the first rows of a Hadamard matrix that is permuted looking at the diagonal of the covariance matrix.
from spyrit.core.meas import HadamSplit
from spyrit.core.noise import Poisson
from spyrit.misc.sampling import meas2img
from spyrit.misc.statistics import Cov2Var
from spyrit.core.prep import SplitPoisson
# Measurement parameters
M = 64 * 64 // 4 # Number of measurements (here, 1/4 of the pixels)
alpha = 100.0 # number of photons
# Measurement and noise operators
Ord = Cov2Var(Cov)
meas_op = HadamSplit(M, h, torch.from_numpy(Ord))
noise_op = Poisson(meas_op, alpha)
prep_op = SplitPoisson(alpha, meas_op)
# Vectorize image
x = x.view(b * c, h * w)
print(f"Shape of vectorized image: {x.shape}")
# Measurements
y = noise_op(x) # a noisy measurement vector
m = prep_op(y) # preprocessed measurement vector
m_plot = m.detach().numpy()
m_plot = meas2img(m_plot, Ord)
imagesc(m_plot[0, :, :], r"Measurements $m$")
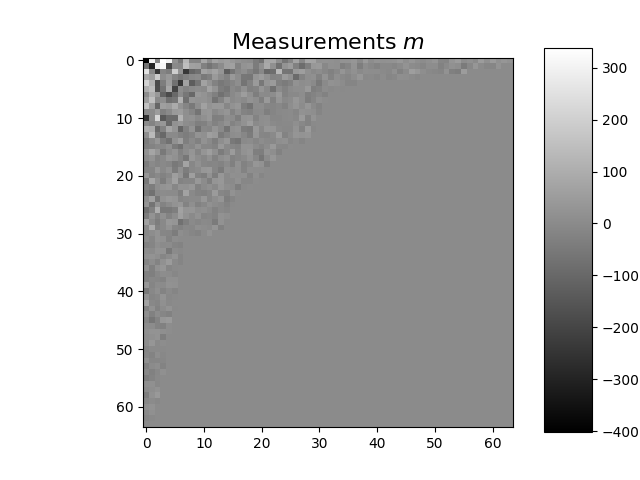
Shape of vectorized image: torch.Size([1, 4096])
Pseudo inverse solution
We compute the pseudo inverse solution using spyrit.core.recon.PinvNet class as in the previous tutorial.
# Instantiate a PinvNet (with no denoising by default)
from spyrit.core.recon import PinvNet
pinvnet = PinvNet(noise_op, prep_op)
# Use GPU, if available
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
pinvnet = pinvnet.to(device)
y = y.to(device)
# Reconstruction
with torch.no_grad():
z_invnet = pinvnet.reconstruct(y)
Denoised completion network (DCNet)
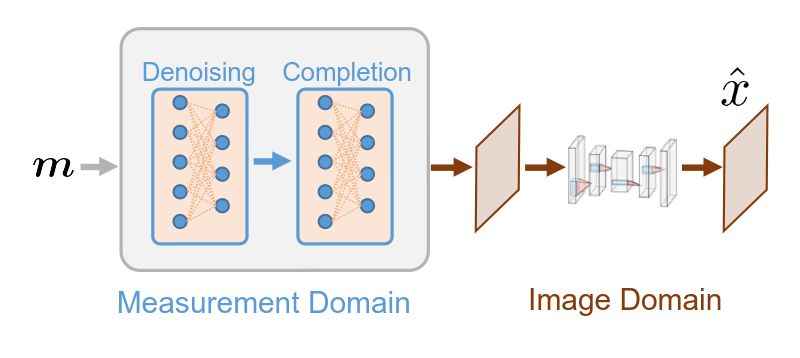
The DCNet is based on four sequential steps:
Denoising in the measurement domain.
Estimation of the missing measurements from the denoised ones.
Image-domain mapping.
(Learned) Denoising in the image domain.
Typically, only the last step involves learnable parameters.
Denoised completion
The first three steps implement denoised completion, which corresponds to Tikhonov regularization. Considering linear measurements \(y = Hx\), where \(H\) is the measurement matrix and \(x\) is the unknown image, it estimates \(x\) from \(y\) by minimizing
where \(\Sigma\) is a covariance prior and \(\Sigma_\alpha\) is the noise covariance. Denoised completation can be performed using the TikhonovMeasurementPriorDiag class (see documentation for more details).
In practice, it is more convenient to use the spyrit.core.recon.DCNet class, which relies on a forward operator, a preprocessing operator, and a covariance prior.
Note
In this tutorial, the covariance matrix used to define subsampling is also used as prior knowledge during reconstruction.
(Learned) Denoising in the image domain
To implement denoising in the image domain, we provide a spyrit.core.nnet.Unet denoiser to a spyrit.core.recon.DCNet.
from spyrit.core.nnet import Unet
denoi = Unet()
dcnet_unet = DCNet(noise_op, prep_op, torch.from_numpy(Cov), denoi)
dcnet_unet = dcnet_unet.to(device) # Use GPU, if available
We load pretrained weights for the UNet
from spyrit.core.train import load_net
# Download weights
url_unet = "https://drive.google.com/file/d/15PRRZj5OxKpn1iJw78lGwUUBtTbFco1l/view?usp=drive_link"
model_path = "./model"
if os.path.exists(model_path) is False:
os.mkdir(model_path)
print(f"Created {model_path}")
model_unet_path = os.path.join(
model_path,
"dc-net_unet_stl10_N0_100_N_64_M_1024_epo_30_lr_0.001_sss_10_sdr_0.5_bs_512_reg_1e-07.pth",
)
load_unet = True
if os.path.exists(model_unet_path) is False:
try:
import gdown
gdown.download(url_unet, f"{model_unet_path}.pth", quiet=False, fuzzy=True)
except:
print(f"Model {model_unet_path} not found!")
load_unet = False
if load_unet:
# Load pretrained model
load_net(model_unet_path, dcnet_unet, device, False)
# print(f"Model {model_unet_path} loaded.")
Downloading...
From: https://drive.google.com/uc?id=15PRRZj5OxKpn1iJw78lGwUUBtTbFco1l
To: /home/docs/checkouts/readthedocs.org/user_builds/spyrit/checkouts/2.3.0/tutorial/model/dc-net_unet_stl10_N0_100_N_64_M_1024_epo_30_lr_0.001_sss_10_sdr_0.5_bs_512_reg_1e-07.pth.pth
0%| | 0.00/149M [00:00<?, ?B/s]
3%|▎ | 4.72M/149M [00:00<00:04, 30.1MB/s]
12%|█▏ | 17.3M/149M [00:00<00:02, 60.1MB/s]
17%|█▋ | 25.7M/149M [00:00<00:02, 56.6MB/s]
23%|██▎ | 34.1M/149M [00:00<00:01, 61.5MB/s]
29%|██▊ | 42.5M/149M [00:00<00:01, 63.5MB/s]
34%|███▍ | 50.9M/149M [00:00<00:01, 65.3MB/s]
40%|███▉ | 59.2M/149M [00:00<00:01, 65.9MB/s]
45%|████▌ | 67.6M/149M [00:01<00:01, 66.7MB/s]
57%|█████▋ | 84.4M/149M [00:01<00:00, 84.1MB/s]
68%|██████▊ | 101M/149M [00:01<00:00, 94.8MB/s]
79%|███████▉ | 118M/149M [00:01<00:00, 104MB/s]
91%|█████████ | 135M/149M [00:01<00:00, 82.8MB/s]
100%|██████████| 149M/149M [00:01<00:00, 79.7MB/s]
Model Loaded: ./model/dc-net_unet_stl10_N0_100_N_64_M_1024_epo_30_lr_0.001_sss_10_sdr_0.5_bs_512_reg_1e-07.pth
We reconstruct the image
with torch.no_grad():
z_dcnet_unet = dcnet_unet.reconstruct(y)
Results
import matplotlib.pyplot as plt
from spyrit.misc.disp import add_colorbar, noaxis
x_plot = x.view(-1, h, h).cpu().numpy()
x_plot2 = z_invnet.view(-1, h, h).cpu().numpy()
x_plot3 = z_dcnet.view(-1, h, h).cpu().numpy()
x_plot4 = z_dcnet_unet.view(-1, h, h).cpu().numpy()
f, axs = plt.subplots(2, 2, figsize=(10, 10))
# Plot the ground-truth image
im1 = axs[0, 0].imshow(x_plot[0, :, :], cmap="gray")
axs[0, 0].set_title("Ground-truth image", fontsize=16)
noaxis(axs[0, 0])
add_colorbar(im1, "bottom")
# Plot the pseudo inverse solution
im2 = axs[0, 1].imshow(x_plot2[0, :, :], cmap="gray")
axs[0, 1].set_title("Pseudo inverse", fontsize=16)
noaxis(axs[0, 1])
add_colorbar(im2, "bottom")
# Plot the solution obtained from denoised completion
im3 = axs[1, 0].imshow(x_plot3[0, :, :], cmap="gray")
axs[1, 0].set_title(f"Denoised completion", fontsize=16)
noaxis(axs[1, 0])
add_colorbar(im3, "bottom")
# Plot the solution obtained from denoised completion with UNet denoising
im4 = axs[1, 1].imshow(x_plot4[0, :, :], cmap="gray")
axs[1, 1].set_title(f"Denoised completion with UNet denoising", fontsize=16)
noaxis(axs[1, 1])
add_colorbar(im4, "bottom")
plt.show()
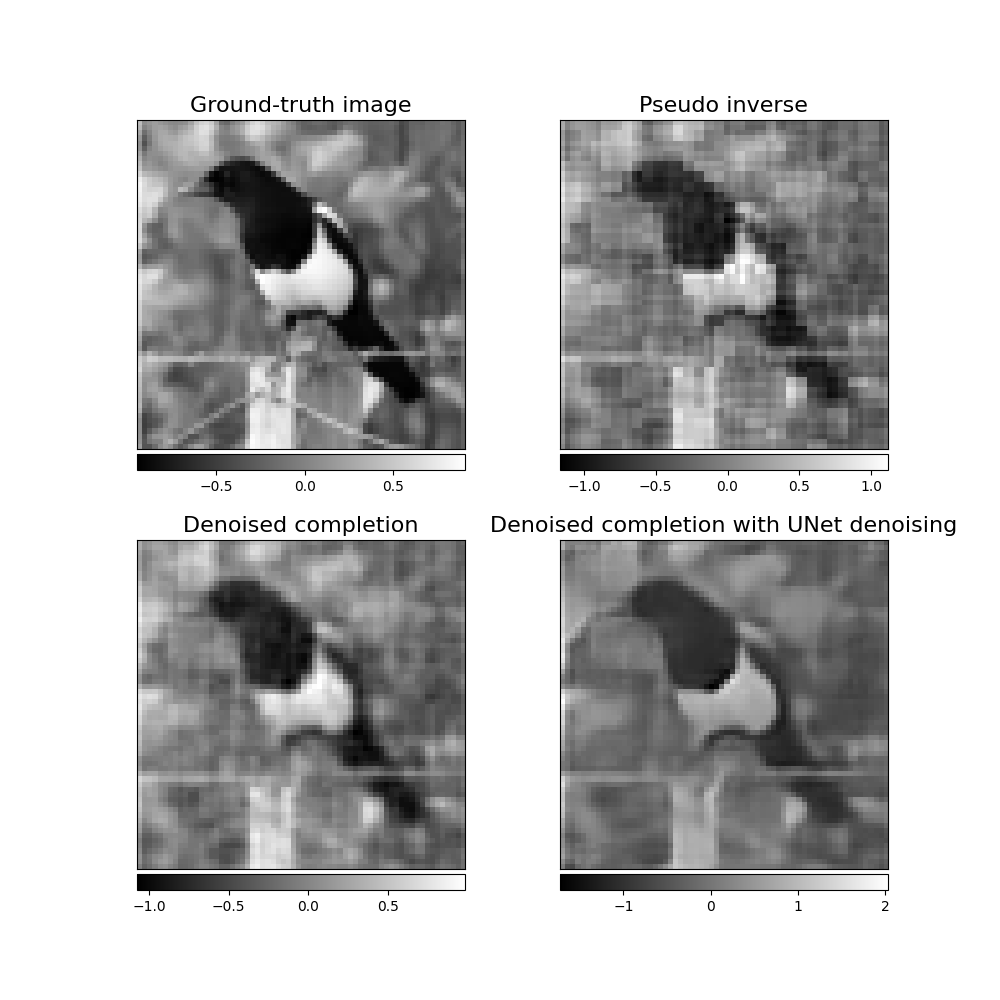
Note
While the pseudo inverse reconstrcution is pixelized, the solution obtained by denoised completion is smoother. DCNet with UNet denoising in the image domain provides the best reconstruction.
Note
We refer to spyrit-examples tutorials for a comparison of different solutions (pinvNet, DCNet and DRUNet) that can be run in colab.
Total running time of the script: (0 minutes 3.865 seconds)