Note
Go to the end to download the full example code.
09. Acquisition and reconstruction of dynamic scenes
This tutorial explains how to reconstruct a motion-compensated image from a dynamic scene.
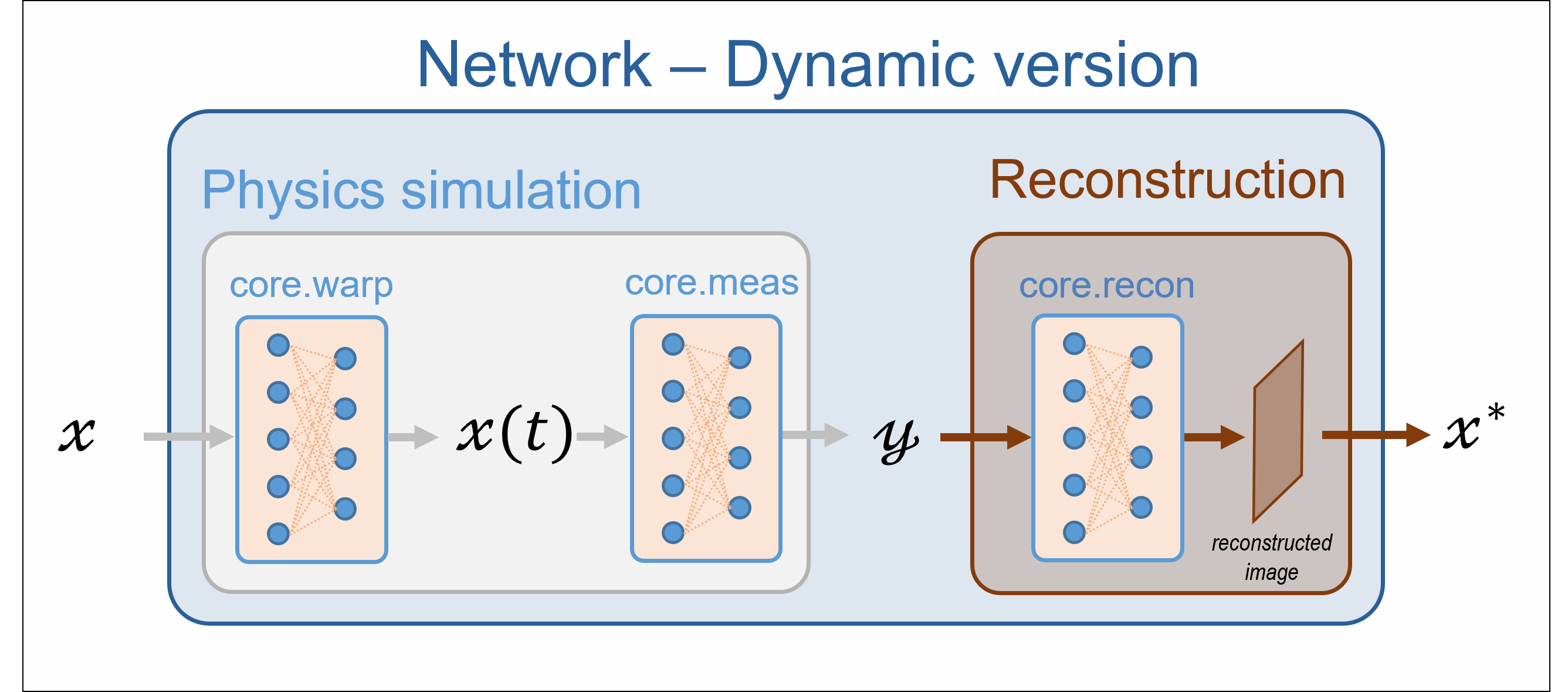
Overview of the dynamic pipeline
There are three steps in the process:
Simulation of the dynamic scene. The
spyrit.core.warpmodule can generate multiple frames by warping a static image, given a motion model or deformation field.Simulation of the measurement. The dynamic classes from
spyrit.core.meascan simulate the sequence of measurement corresponding to the time frames.Reconstruction of a motion-compensated image from the sequence of measurement.
This tutorial illustrates the three steps through a simple example. Details about the spyrit.core.warp module are included at the end of the example.
1. Generate a video by warping a reference image
Load an image from a batch of images
As in the other tutorials, we load images from the /images/ folder. Here, we consider a 32x32 image for simplicity.
import os
import math
import torch
import torchvision
from spyrit.misc.disp import imagesc
from spyrit.misc.statistics import transform_gray_norm
# sphinx_gallery_thumbnail_path = 'fig/tuto9.png'
img_size = 32 # full image side's size in pixels
meas_size = 32 # measurement pattern side's size in pixels (Hadamard matrix)
img_shape = (img_size, img_size)
meas_shape = (meas_size, meas_size)
i = 1 # Image index (modify to change the image)
spyritPath = os.getcwd()
imgs_path = os.path.join(spyritPath, "images/")
# Create a transform for natural images to normalized grayscale image tensors
transform = transform_gray_norm(img_size=img_size)
# Create dataset and loader (expects class folder 'images/test/')
dataset = torchvision.datasets.ImageFolder(root=imgs_path, transform=transform)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=7)
x, _ = next(iter(dataloader))
print(f"Shape of input images: {x.shape}")
# Select image
x = x[i : i + 1, :, :, :]
x = x.detach().clone()
b, c, h, w = x.shape
# plot
x_plot = x.view(img_shape).cpu()
imagesc(x_plot, r"Original image $x$ in [-1, 1]")
![Original image $x$ in [-1, 1]](../_images/sphx_glr_tuto_09_dynamic_001.png)
Shape of input images: torch.Size([7, 1, 32, 32])
Define an affine warping
We define an affine transformations using the spyrit.core.warp.AffineDeformationField class, which is instantiated using 3 arguments:
a function \(f(t)\), where \(t\) represents time,
a list of times \((t_0, ... , t_n)\) where \(f\) is evaluated,
the image size (used to determine the grid size) \((height, width)\).
The \(f(t)\) function is a 3x3 matrix-valued function that represents the affine transformation. For more details, see here.
First, we define \(f\) as in [MaBM23] and [MaBP24].
a = 0.2 # amplitude
omega = math.pi # angular speed
def s(t):
return 1 + a * math.sin(t * omega) # base function for f
def f(t):
return torch.tensor(
[
[1 / s(t), 0, 0],
[0, s(t), 0],
[0, 0, 1],
],
dtype=torch.float64,
)
Note
Especially for large images, it is recommended to set the dtype of the output of \(f\) to torch.float64 to reduce numerical errors.
Next, we create the time vector, define the image shape, and compute the deformation field.
from spyrit.core.warp import AffineDeformationField
time_vector = torch.linspace(0, 10, (meas_size**2) * 2) # *2 because of the splitting
aff_field = AffineDeformationField(f, time_vector, img_shape)
Note
The number of measurement patterns must match the number of frames of the video. Therefore, we set the number of frames to the square of the measurement size.
Warp the image
Warping works with vectorized images. So, we first reshape the image from (b,c,h,w) to (c, h*w)
x = x.view(c, h * w)
We can now warp the image
x_motion = aff_field(x, 0, (meas_size**2) * 2)
c, n_frames, n_pixels = x_motion.shape
Note
Currently, the AffineDeformationField and DeformationField can only warp a single image at a time.
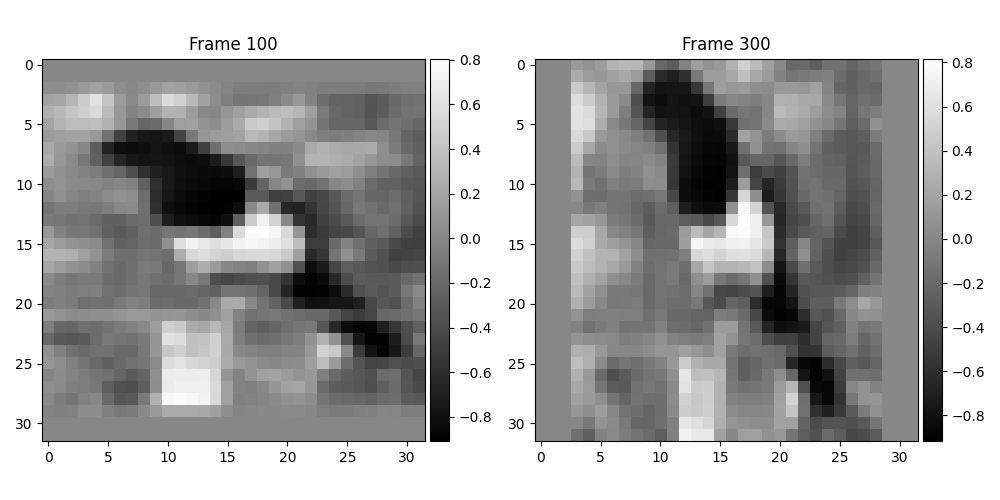
Plot two time frames
import matplotlib.pyplot as plt
from spyrit.misc.disp import add_colorbar
frames = [100, 300]
plot, axes = plt.subplots(1, len(frames), figsize=(10, 5))
for i, f in enumerate(frames):
im = axes[i].imshow(x_motion[0, f, :].view(img_shape).cpu().numpy(), cmap="gray")
axes[i].set_title(f"Frame {f}")
add_colorbar(im, "right", size="20%")
plot.tight_layout()
plt.show()
2. Simulation of the measurements
In this section, we simulate the acquisition of the previous video. We consider a full Hadamard matrix (no subsampling) using the spyrit.core.meas.DynamicHadamSplit class.
Note
For the moment, no noise can be applied to the dynamic measurement operators. This will be available in a future release. As a consequence, the preprocessing operators are also unavailable.
Instantiation of a dynamic measurement operator
The DynamicHadamSplit class is the counterpart of the
HadamardSplit class for dynamic scenes. The dynamic measurement operator considers a different frame for each of the measurement patterns. Therefore, the number of frames in the video must be the same as the number of measurement patterns .
from spyrit.core.meas import DynamicHadamSplit
meas_op = DynamicHadamSplit(M=meas_size**2, h=meas_size, Ord=None, img_shape=img_shape)
# show the measurement matrix H
print("Shape of the measurement matrix H:", meas_op.H_static.shape)
# as we are using split measurements, it is the matrix P that is effectively
# used when computing the measurements
print("Shape of the measurement matrix P:", meas_op.P.shape)
Shape of the measurement matrix H: torch.Size([1024, 1024])
Shape of the measurement matrix P: torch.Size([2048, 1024])
Note
If there are too many frames in your video, you may want to use only the first frames of it. If there are too many patterns in your acquisition operator, you may want to reduce this number by setting the parameter M.
Simulation
As in the static case, this is done by calling (implicitly) forward method.
y = meas_op(x_motion)
Plot the measurements
imagesc(y.view((meas_size * 2, meas_size)).cpu().numpy(), "Measurement vector")
3. Reconstruction of the motion-compensated (reference) image
In this section, we reconstruct the motion-compensated (reference) image from the dynamic measurements. This a two-step approach:
Construction of a dynamic forward matrix that combines the knowledge of the measurement patterns and the deformation field.
Resolution of a linear problem based on the dynamic forward matrix.
For details, refer to [MaBM23] and [MaBP24].
Computation of the dynamic measurement matrix
The dynamic measurement matrix \(H_{\rm dyn}\) is defined as the measurement matrix that gives the dynamic measurement vector \(y\) from the reference image \(x_{\rm ref}\)
The dynamic measurement matrix is built by calling the build_H_dyn() method of the measurement operator, given a deformation field.
print("H_dyn computed:", hasattr(meas_op, "H_dyn"))
meas_op.build_H_dyn(aff_field, mode="bilinear")
print("H_dyn computed:", hasattr(meas_op, "H_dyn"))
H_dyn computed: False
H_dyn computed: True
This method adds to the measurement operator a new attribute named
H_dyn. It can also be accessed using the attribute name H for
compatibility reasons, although it is NOT recommended.
Note
There are different strategies for building \(H_{\rm dyn}\). Here, we consider the method described in [MaBP24] that avoids warping the Hadamard patterns.
Note
Here, the deformation field is known. In the general case, it will have to be estimated.
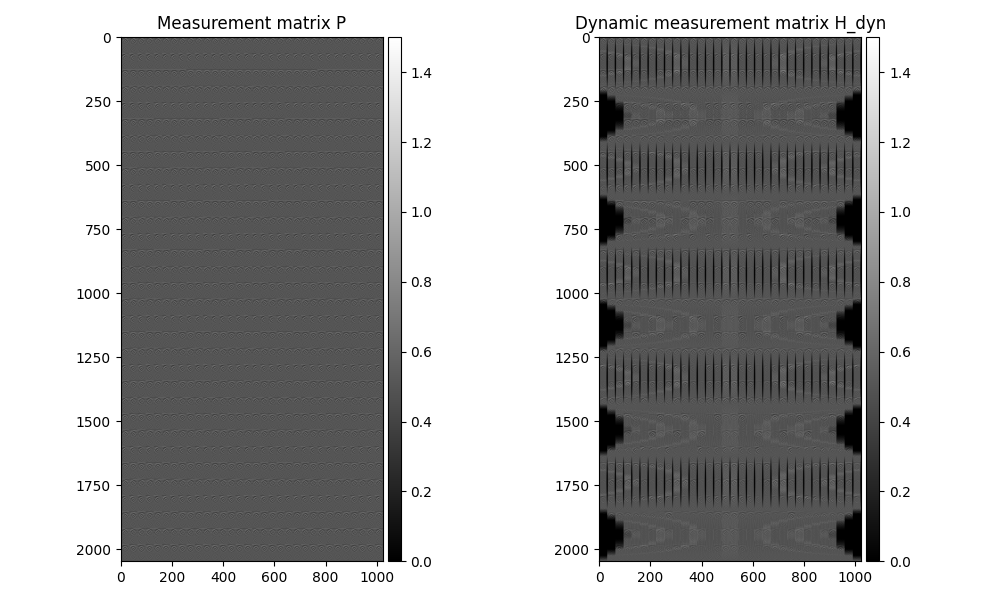
Important
The dynamic measurement matrix H_dyn is computed from the actual measurement matrix \(P\) that is obtained by splitting the Hadamard matrix (see Tutorial 5). This can be seen by checking their shapes, which are the transpose of each other.
H_dyn shape: torch.Size([2048, 1024])
P shape: torch.Size([2048, 1024])
H shape: torch.Size([2048, 1024])
H_dyn is same as H: tensor(True)
We plot the actual and dynamic measurement matrix
plot, (ax1, ax2) = plt.subplots(1, 2, figsize=(10, 6))
im1 = ax1.imshow(meas_op.P.cpu().numpy(), vmin=0, vmax=1.5, cmap="gray")
ax1.set_title("Measurement matrix P")
add_colorbar(im1, "right", size="20%")
im2 = ax2.imshow(meas_op.H_dyn.cpu().numpy(), vmin=0, vmax=1.5, cmap="gray")
ax2.set_title("Dynamic measurement matrix H_dyn")
add_colorbar(im2, "right", size="20%")
plot.tight_layout()
plt.show()
Reconstruction
We first compute the pseudo-inverse of the dynamic measurement matrix by calling the build_H_dyn_pinv() method that allows regularization.
print("H_dyn_pinv computed:", hasattr(meas_op, "H_dyn_pinv"))
meas_op.build_H_dyn_pinv(reg="L2", eta=1e-6)
print("H_dyn_pinv computed:", hasattr(meas_op, "H_dyn_pinv"))
H_dyn_pinv computed: False
H_dyn_pinv computed: True
This creates a new attribute H_dyn_pinv that stores the pseudo-inverse of H_dyn. As before, the same tensor can be accessed through the attribute H_pinv, for compatibility reasons, although it is not recommended.
Next, we simply call the pinv() method.
x_hat1 = meas_op.pinv(y)
print("x_hat1 shape:", x_hat1.shape)
x_hat1 shape: torch.Size([1, 1024])
As in the static case, this can also be done through using spyrit.core.recon.PseudoInverse class.
from spyrit.core.recon import PseudoInverse
recon_op = PseudoInverse()
x_hat2 = recon_op(y, meas_op)
print("x_hat1 and x_hat2 are equal:", (x_hat1 == x_hat2).all())
x_hat1 and x_hat2 are equal: tensor(True)
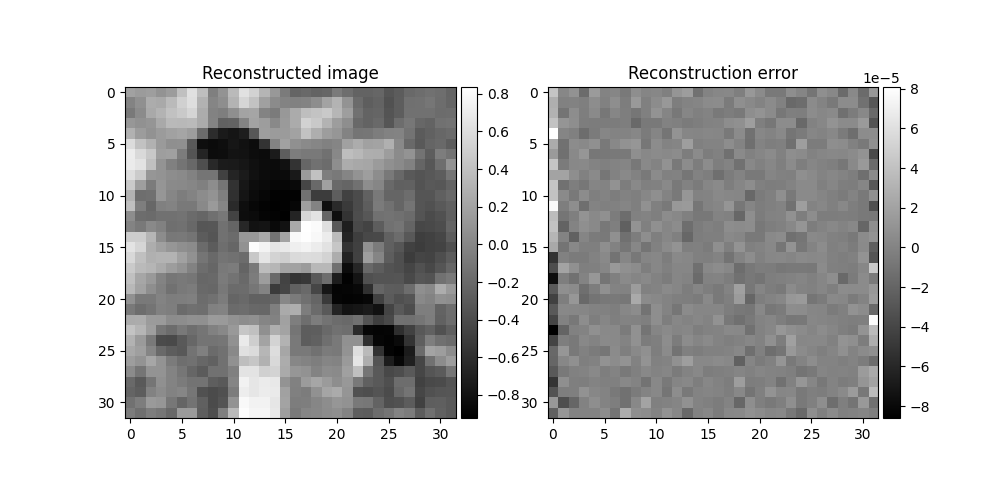
We finally plot the reconstructed image and its difference with the ground-truth image
plot, (ax1, ax2) = plt.subplots(1, 2, figsize=(10, 5))
im1 = ax1.imshow(x_hat1.view(img_shape), cmap="gray")
ax1.set_title("Reconstructed image")
add_colorbar(im1, "right", size="20%")
im2 = ax2.imshow(x_plot.view(img_shape) - x_hat1.view(img_shape), cmap="gray")
ax2.set_title("Reconstruction error")
add_colorbar(im2, "right", size="20%")
# plot.tight_layout()
plt.show()
Note
As with static reconstruction, it is possible to reconstruct the motion-compensated image without having to compute the pseudo-inverse explicitly. Calling the method pinv() while the attribute H_dyn_pinv is not defined will result in using the torch.linalg.lstsq() solver.
4. Warping detailed explanation
This tutorial uses the class spyrit.core.warp.AffineDeformationField
to simulate the movement of a still image. This class is a subclass of
spyrit.core.warp.DeformationField, which can be used to deform an
image in a more general manner. This is particularly useful for experimental
setups where the deformation is estimated from real measurements.
Here, we provide an example of how to use the class
spyrit.core.warp.DeformationField. The class takes one argument:
the deformation field itself of shape \((n_{\rm frames},h,w,2)\), where
\(n_{\rm frames}\) is the number of frames, and \(h\) and \(w\) are the
height and width of the image. The last dimension represents the 2D
pixel from where to interpolate the new pixel value at the coordinate
\((h,w)\).
We will first use an instance of spyrit.core.warp.AffineDeformationField
to create the deformation field. Then, a separate instance of
spyrit.core.warp.DeformationField will be created using the
deformation field from the affine deformation field.
from spyrit.core.warp import DeformationField
# define a rotation function
omega = 2 * math.pi # angular velocity
def rot(t):
ans = torch.tensor(
[
[math.cos(t * omega), -math.sin(t * omega), 0],
[math.sin(t * omega), math.cos(t * omega), 0],
[0, 0, 1],
],
dtype=torch.float64,
) # it is recommended to use float64
return ans
# create a time vector of length 100 (change this to fit your needs)
t0 = 0
t1 = 10
n_frames = 100
time_vector = torch.linspace(t0, t1, n_frames)
img_shape = (50, 50) # image shape
# create the affine deformation field
aff_field2 = AffineDeformationField(rot, time_vector, img_shape)
Now that the affine deformation field is created, we can access the
deformation field through the attribute field. Its value can then be
used to create a new instance of spyrit.core.warp.DeformationField.
# get the deformation field
field = aff_field2.field
print("field shape:", field.shape)
# create an instance of DeformationField
def_field = DeformationField(field)
# def_field and aff_field2 are the same
print("def_field and aff_field2 are the same:", (def_field == aff_field2))
field shape: torch.Size([100, 50, 50, 2])
def_field and aff_field2 are the same: True
References for dynamic reconstruction
Total running time of the script: (0 minutes 3.158 seconds)